Autour du gnomon
| cadran horizontal | cadran vertical | cadran analemmatique | cadran bifilaire | nous contacter |
| cadran horizontal | cadran vertical | cadran analemmatique | cadran bifilaire | nous contacter |
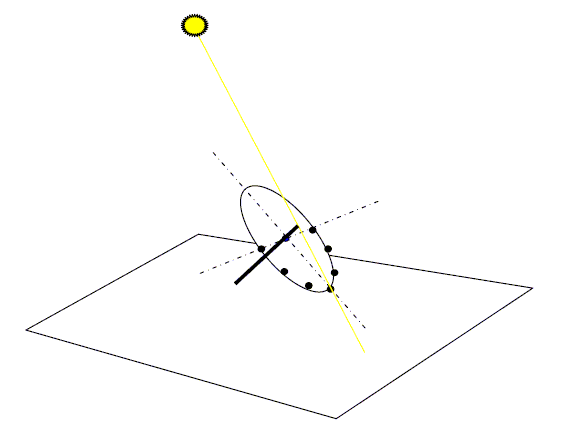
1) il faut partir d'un cadran équatorial (armillaire) qui a une particularité : l'ombre de l'extrémité du style coincide avec le repère de temps de l'anneau équatorial
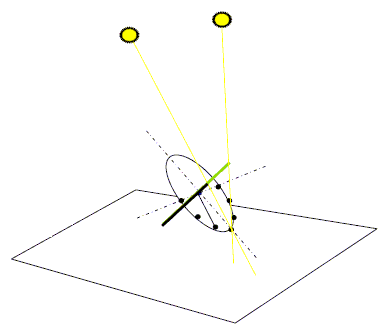 2) cette coincidence avec le repère de temps sur l'anneau équatorial doit être possible quelque soit la déclinaison solaire : cela veut dire que le style doit être ajustable (dans le principe) en longueur. C'est la projection de cette variation de longueur qui constitue l'échelle des dates sur le plan de lecture du cadran analemmatique associé
2) cette coincidence avec le repère de temps sur l'anneau équatorial doit être possible quelque soit la déclinaison solaire : cela veut dire que le style doit être ajustable (dans le principe) en longueur. C'est la projection de cette variation de longueur qui constitue l'échelle des dates sur le plan de lecture du cadran analemmatique associé
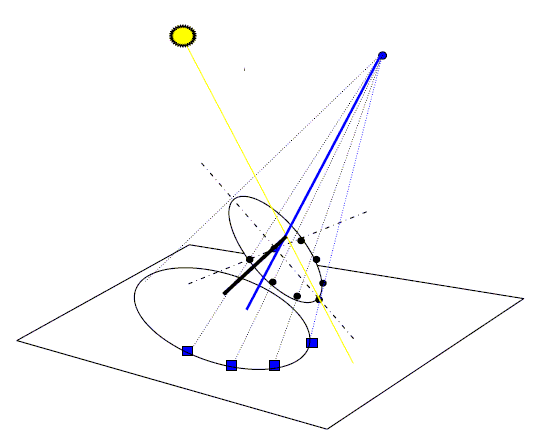 3) Ceci est le principe de base du cadran analemmatique, il faut considérer un point de l'espace, qui peut-être à l'infini, à partir duquel on projette le cadran équatorial sur le plan de lecture du cadran analemmatique (ce plan est le sol par exemple). Sur le shéma ci-dessous on comprend que le point de projection, l'extrémité du style du cadran équatorial, le repère de temps sur l'anneau équatoriale constitue un plan. Les projections des repères de temps de l'anneau équatorail sur le plan de lecture constitueront les repères de temps du cadran analemmatique.
3) Ceci est le principe de base du cadran analemmatique, il faut considérer un point de l'espace, qui peut-être à l'infini, à partir duquel on projette le cadran équatorial sur le plan de lecture du cadran analemmatique (ce plan est le sol par exemple). Sur le shéma ci-dessous on comprend que le point de projection, l'extrémité du style du cadran équatorial, le repère de temps sur l'anneau équatoriale constitue un plan. Les projections des repères de temps de l'anneau équatorail sur le plan de lecture constitueront les repères de temps du cadran analemmatique.
 4) enfin le style du cadran analemmatique, dont l'ombre marquera la direction du repère de temps, est la matérialisation de la droite qui passe par le point de projection et l'extrémité du style du cadran équatorial. On comprend alors que dans le cas général le style doit être mobile car l'extrémité du style du cadran équatorial associé doit être ajustée à la déclinaison solaire (voir point1)
4) enfin le style du cadran analemmatique, dont l'ombre marquera la direction du repère de temps, est la matérialisation de la droite qui passe par le point de projection et l'extrémité du style du cadran équatorial. On comprend alors que dans le cas général le style doit être mobile car l'extrémité du style du cadran équatorial associé doit être ajustée à la déclinaison solaire (voir point1)
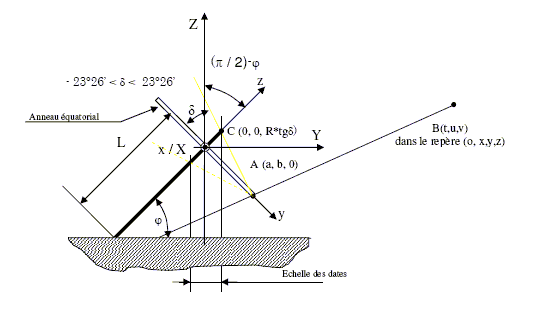 La figure ci-dessous positionne les repères et les points qui permettront de déterminer les équations recherchées.
La figure ci-dessous positionne les repères et les points qui permettront de déterminer les équations recherchées.
Pour tout point A qui appartient à l’anneau équatorial de rayon R, z=0
L’anneau équatorial est un cercle, il existe donc une relation entre a et b qui sont les autres coordonnées de A [rappel A (a, b, 0)] :
b² + a² = R²
ou encore sous la forme polaire :
a = R cos (al)
b = R sin (al)
Avec al = 0° (18h), 15° (17h), 30° (116h),…., -15 (19h) ,-30° (20 h) pour les heures.
Prenons un point B de l’espace de coordonnées (t,u,v) et recherchons l’équation de la droite (A,B) droite qui passe par les points A et B.
Un vecteur directeur de la droite (A,B) est le vecteur AB. Ces coordonnées sont :
AB [(t-a), u-b, v]
Tous les points M (x,y,z) qui appartiennent à la droite vérifieront l’équation suivante:
AM = kAB
C'est-à-dire :
x-a = k(t-a) è k = (x-a) / (t-a) (1)
y-b = k(u-b) è k = (y-b) /( u-b) (2)
z= kv è k = z / v (3)
On peut en déduire les 2 relations suivantes (ce sont 2 équations de plans dont l’intersection détermine la droite (A,B)) :
(1) = (2) è (x-a) (u-b) = (y-b) (t-a)
(2) = (3) è v (y-b) = z (u-b)
Après développement on obtient finalement :
è (u-b)x + (a-t)y + b(t-a) +a(b-u)=0
è vy+(b-u)z –vb = 0
Imaginons que le point B est à la verticale du centre du cadran équatoriale. Ses coordonnées seront alors :
B(0,-w sin(90-(φ)),wcos(90-(φ))) ou B(0,-wcos(φ),wsin(φ))
Dans les équations si dessous qui définissent la droite (A ,B) :
(u-b)x + (a-t)y + b(t-a) +a(b-u)=0
et
vy+(b-u)z –vb = 0
Remplaçons les coordonnées (t,u,v,) par les valeurs des coordonnées de B pour ce cas particulier : [0,-wcos(„Û),wsin(„Û)] :
On obtient alors :
è(-cos(φ)-b/w)x +(a/w)y + a(b/w+cos(φ))=0
è (sin(φ)) y + (b/w+ cos(φ))z- (sin(φ))b = 0
Si l’on fait maintenant une projection du cadran équatorial sur le sol, cela revient à mettre le point B à l’infini sur l’axe des « z » autrement dit on fait tendre « w » vers l’infini.
Les équation de la droite (A,B) s’écrivent alors :
è -x cos(φ) + a cos(φ) =0 è x=a
è y sin(φ) + zcos(φ) –bsin(φ) =0 è y+ztg(φ) = b
Recherchons l’intersection de la droite (A,B) avec sol :
Le vecteur N (0,-cos(φ),sin(φ)) est perpendiculaire au sol
Le plan du sol a donc pour équation
-cos(φ)y+sin(φ)z + d = 0
or le sol passe par le point de coordonnées (0,0,-L)
è d = Lsin(φ)
L’équation du plan est finalement :
-cos(φ)y+sin(φ)z + Lsin(φ) = 0
ou encore
(-y) cotg(φ) +z+L = 0
Les coordonnées du point d’intersection de la droite (A,B) avec le sol seront les solutions du système d’équations ci-dessous : en fait le point d’intersection recherché est l’intersection des 3 plans suivants :
è x=a
è y sin(φ) + zcos(φ) –bsin(φ) =0 è y+zcotg(φ) = b
è (-y) cotg(φ) +z+L = 0
Pour faciliter le calcul changeons de repère :
oM = oO+OM
xi+yj+zk = XI+YJ+ZK
xi+yj+zk = Xi+Y(sin(φ)j+cos(φ)k)+Z(-cos(φ)j+sin(φ)k)
On a donc les égalités suivantes :
x=X
y=Ysin(φ) – Zcos(φ)
z=Ycos(φ)+Zsin(φ)
Le système d’équations sécrit alors :
è X=a
è (Ysin(φ) – Zcos(φ))+(Ycos(φ)+Zsin(φ))cotg(φ)=b èY(sin(φ)+cos(φ)cotg(φ))=b
è (Zcos(φ)-Ysin(φ))cotg(φ)+Ycos(φ)+Zsin(φ)=-L èZ(cos(φ)cotg(φ)+sin(φ))=-L
Après simplification il vient :
è X = a
è Y = bsin(φ)
è Z = - Lsin(φ)
Puis remplaçant a et b par leur expression on trouve les équations recherchées :
è X = R cos(al)
è Y = R sin(al)sin(φ)
è Z = -Lsin(φ)
Echelle des dates [H]
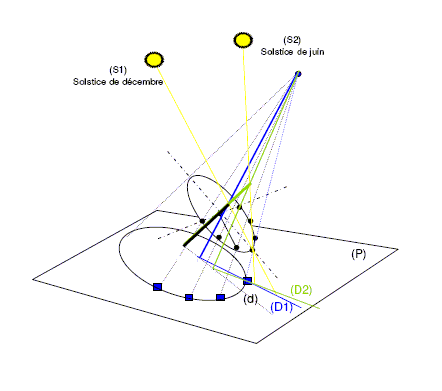
Comme on l’a vu plus haut le style mobile des cadrans analemmatiques doit passer par le centre de projection, le point B.
On sait aussi que, quelque soit la déclinaison solaire, l’ombre de l’extrémité du style fictif (le point C sur la figure) du cadran équatorial associé doit converger, pour une heure donnée, sur l’anneau équatorial. Ceci est rendu possible en déplaçant l’extrémité du style fictif sur une droite parallèle à l’axe des pôles.
Enfin pour que le cadran analemmatique fonctionne il est nécessaire que le point de projection, l’extrémité du style fictif et le point de convergence sur l’anneau équatorial soient dans le même plan. Le style passant lui par B et par C
L’échelle des dates est la trace au sol du style du cadran analemmatique.
Recherchons les paramètres de cette échelle. Revient à trouver pour certaine date de l’année l’intersection du style [droite (C,B)] avec le sol.
Un vecteur directeur de la droite (C,B) est le vecteur CB. Ces coordonnées sont :
CB [t, b, (v-Rtg(δ)]
Tous les points M (x,y,z) qui appartiennent à la droite vérifieront l’équation suivante:
CM = kCB
C(0,0,Rtg(δ)) ; M(x, y, z) ; B(t,u,v)
C'est-à-dire :
x = k(t) è k = x/ t (1)
y = k(u) è k = y /( u) (2)
z-Rtg(δ) = k(v-Rtg(δ)) è k = z-tg(δ) / (v-Rtg(δ)) (3)
On peut en déduire les 2 relations suivantes (ce sont 2 équations de plans dont l’intersection détermine la droite (A,B)) :
(1) = (2) è ux = ty
(2) = (3) è y(v-Rtg(δ)) = u(z-Rtg(δ)) è y(v-Rtg(δ)) –uz = uRtg(δ)
Après développement on obtient finalement :
è ux –ty =0
è (Rtg(δ)-v)y+uz -uRtg(δ) = 0
Imaginons que le point B est à la verticale du centre du cadran équatoriale. Ses coordonnées seront alors :
B(0,-w sin(90-(φ)),wcos(90-(φ))) ou B(0,-wcos(φ),wsin(φ))
Dans les équations si dessous qui définissent la droite (A ,B) :
ux –ty =0
et
(Rtg(δ)-v)y+uz -uRtg(δ) = 0
Remplaçons les coordonnées (t,u,v,) par les valeurs des coordonnées de B pour ce cas particulier : [0,-wcos(φ),wsin(φ)] :
On obtient alors :
èx =0
è (Rtg(δ)-wsin(φ)) y - zwcos(φ)+Rtg(δ)cos(φ) = 0 è(Rtg(δ)/w-sin(φ)) y - zcos(φ)+Rtg(δ)cos(φ) = 0
Si l’on fait maintenant une projection du cadran équatorial sur le sol, cela revient à mettre le point B à l’infini sur l’axe des « z » autrement dit on fait tendre « w » vers l’infini.
Les équation du style est alors :
è x=0
è -sin(φ)y-zcos(φ) +Rtg(δ)cos(φ) = 0 è tg(φ)y + z = Rtg(δ)
Recherchons l’intersection de la droite (A,B) avec sol :
Le vecteur N (0,-cos(φ),sin(φ)) est perpendiculaire au sol
Le plan du sol a donc pour équation
-cos(φ)y+sin(φ)z + d = 0
or le sol passe par le point de coordonnées (0,0,-L)
è d = Lsin(φ)
L’équation du plan est finalement :
-cos(φ)y+sin(φ)z + Lsin(φ) = 0
ou encore
(-y) cotg(φ) +z+L = 0
Les coordonnées du point d’intersection de la droite (A,B) avec le sol seront les solutions du système d’équations ci-dessous : en fait le point d’intersection recherché est l’intersection des 3 plans suivants :
è x=a
è y sin(φ) + zcos(φ) –bsin(φ) =0 è y+zcotg(φ) = b
è (-y) cotg(φ) +z+L = 0
Pour faciliter le calcul changeons de repère :
oM = oO+OM
xi+yj+zk = XI+YJ+ZK
xi+yj+zk = Xi+Y(sin(φ)j+cos(φ)k)+Z(-cos(φ)j+sin(φ)k)
On a donc les égalités suivantes :
x=X
y=Ysin(φ) – Zcos(φ)
z=Ycos(φ)+Zsin(φ)
Le système d’équations sécrit alors :
è X=0
è tg(φ)(Ysin(φ)–Zcos(φ))+Ycos(φ)+Zsin(φ)=Rtg(δ)èYsin(φ)tg(φ)+Ycos(φ)=Rtg(δ)èY = Rtg(δ)cos(φ)
è (Zcos(φ)-Ysin(φ))cotg(φ)+Ycos(φ)+Zsin(φ)=-L èZ(cos(φ)cotg(φ)+sin(φ))=-L
Après simplification il vient :
è X = 0
è Y = Rtg(δ)cos(φ)
è Z = - Lsin(φ)
Cadran analemmatique horizontal à style polaire [H]
la figure ci-dessous montre les repères qui permettront de trouver les coordonnées des plots horaires sur le plan de lecture.
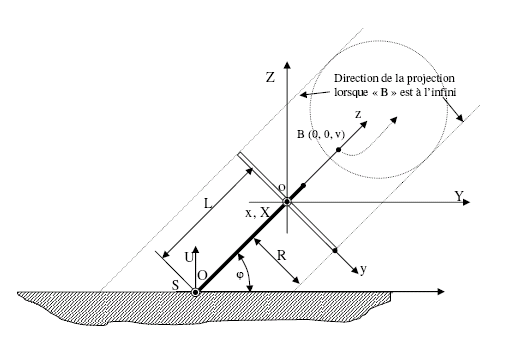
Pour que le style reste fixe il faut qu’il soit parallèle à l’axe des pôles. Cela veut dire que le point « B », centre de la projection, est placé sur l’axe « z » il a donc pour coordonnées B(0,0,v) [nota : on fait les calcul avec « v » puis on fera tendre v vers l’infini ].
On a démontré plus haut que, dans le cas général, la droite (A,B) vérifie les équations suivantes
è (u-b)x + (a-t)y + b(t-a) +a(b-u)=0 (1)
è vy+(b-u)z –vb = 0 (2)
en remplaçant t et u par « 0 » dans les équations (1) et (2) il vient alors :
è(1) -bx +ay =0 è -bx+ab=0 è x=a
è(2) vy+bz-vb=0 è y+(b/v)z-b=0 è y=b (on fait tendre v vers l'infini donc b/v tend vers "0")
Plaçons nous dans le repère (o,X,Y,Z) qui simplifiera les coordonnées des plots horaires. Le changement de repère se fait en remplaçant les coordonnées x,y,z par leur valeurs en fonction de X, Y, Z :
x=X
y=Ysin(φ) – Zcos(φ)
z=Ycos(φ)+Zsin(φ)
On trouve :
x= X = Rcos(al)
y= Ysin(φ)+Lsin(φ)cos(φ)=Rsin(al) è Y=(Rsin(al)/sin(φ))-Lcos(φ)
Faisons un nouveau changement de repère (O,S,T,U) O étant le pied du style (fictif) du cadran équilatéral associé , c’est aussi, pour ce cas particulier, le pied du style fixe du cadran analemmatique, S étant un axe parallèle à X ou x :
X=S
Y=T-Lcos(φ)
Z = U-Lsin(φ)
On a donc les équations suivantes
S= Rcos(al)
T = (Rsin(al)/sin(φ))
U = 0